ABSTRACT
A smart connected car in conjunction with the Internet of Things (IoT) is an emerging topic. The fundamental concept of the smart connected car is connectivity, and such connectivity can be provided by three aspects, such as Vehicle-to-Vehicle (V2V), Vehicle-to-Infrastructure (V2I), and Vehicle-to-Everything (V2X). To meet the aspects of V2V and V2I connectivity, we developed modules in accordance with international standards with respect to On-Board Diagnostics II (OBDII) and 4G Long Term Evolution (4G-LTE) to obtain and transmit vehicle information. We also developed software to visually check information provided by our modules.
Information related to a user’s driving, which is transmitted to a cloud-based Distributed File System (DFS), was then analyzed for the purpose of big data analysis to provide information on driving habits to users. Yet, since this work is an ongoing research project, we focus on proposing an idea of system architecture and design in terms of big data analysis. Therefore, our contributions through this work are as follows: (1) Develop modules based on Controller Area Network (CAN) bus, OBDII, and 4G-LTE; (2) Develop software to check vehicle information on a PC; (3) Implement a database related to vehicle diagnostic codes; (4) Propose system architecture and design for big data analysis.
RELATED WORK
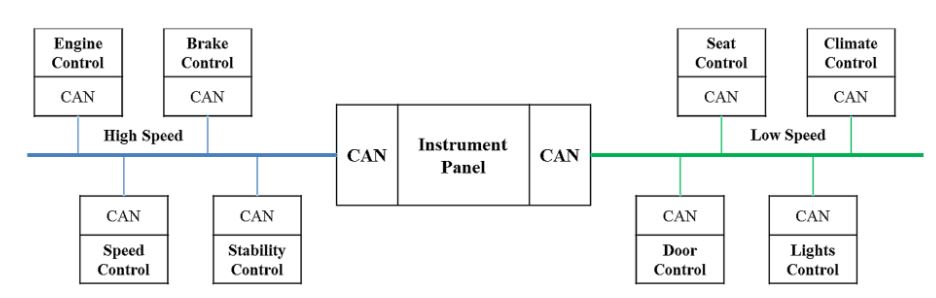
Figure 3. High speed and low speed CAN buses
Next, which CAN is used for collecting vehicle information needs to be examined. As mentioned earlier, a number of ECUs are connected on CAN bus, and two important concepts can be extracted. The first extracted concept is a CAN bus topology in which multiple ECUs communicate to each other through CAN bus. The second extracted concept is that there are two different types of CAN which are connected through the gateway shown in Figure 3 below, i.e., high speed CAN and low-speed CAN.
THE PROPOSED RESEARCH DIRECTIONS AND SYSTEM ARCHITECTURE
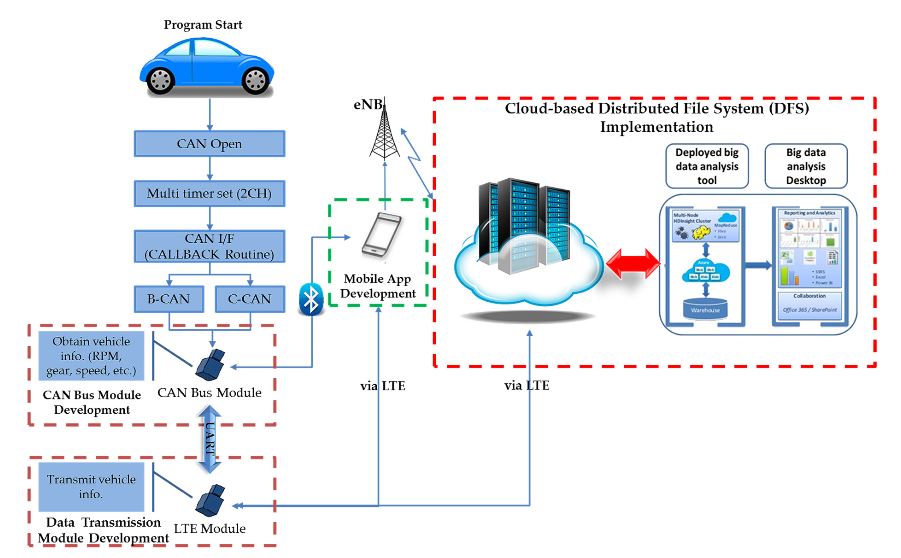
Figure 5. The overall system architecture
According to our proposed system architecture shown in Figure 5 above, there are three main components which need to be developed. The first component is the CAN bus module, through which the vehicle information mostly related to the power train can be obtained. However, this CAN bus module has hidden features which can remotely control a vehicle through a mobile application. Since these hidden features are out of the research scope, we will not mention them in the rest of the paper. Yet, once information is obtained by the CAN bus module, such information can be transmitted to a mobile device through Bluetooth and is checked by software on the PC.
PROOF OF ACTUAL DEVELOPMENT AND PROPOSING SYSTEM DESIGN
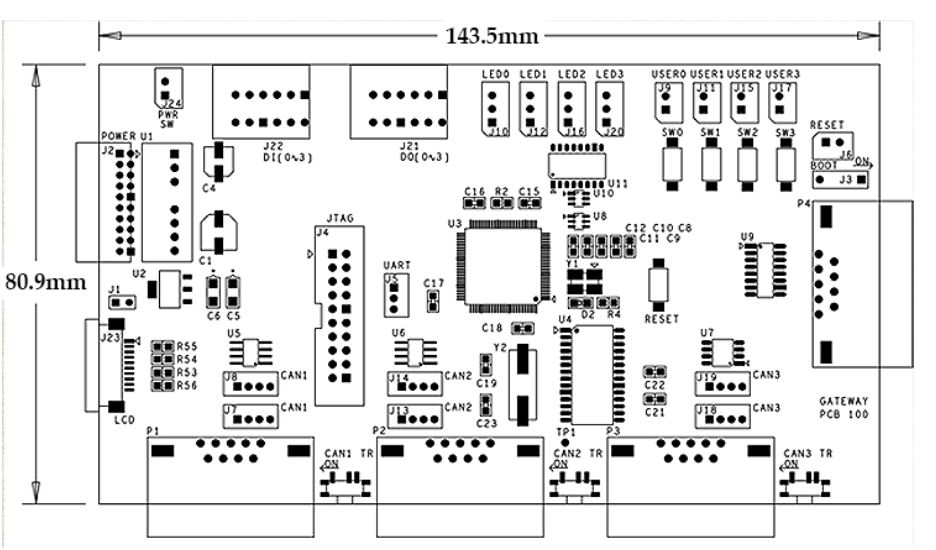
Figure 6. Blueprint of the module
To achieve the first and sixth research directions described in the previous section, OBDII and Bluetooth were applied to develop the CAN bus module. It is important to note that OBDII is internationally standardized by ISO 15765-4, SAE J1939, ISO 9141-2, ISO 14230-4, SAE J1850 PWM, and J1853 VPW. The circuit and PCB board design included the function of the ELM327 chipset, which is a programmed microcontroller developed by ELM electronics (London, ON, Canada). Note that the ELM327 protocol is the PC-to-OBD interface standard. Figure 6 depicts a blueprint of the module.
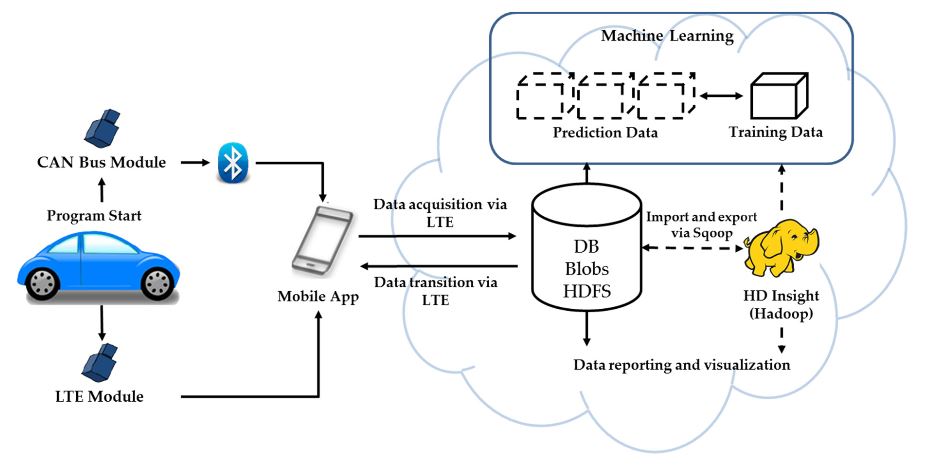
Figure 14. Overview of Distributed File System (DFS) design
According to our examination of the DFS for big data analysis, Microsoft Azure would be the strongest DFS candidate for our system due to scalability and compatibility, and we are proposing the DFS design shown in Figure 14. Once vehicle information is transmitted to and stored in the cloud server via LTE, the acquired data is loaded from the HDFS to Azure HD Insight via Sqoop for the purpose of data analysis. Note that Sqoop is a tool used to import and export data between a DB and HD Insight. There are two objectives of data analysis. The first objective is to provide data reporting and visualization in terms of driving habits, diagnostic logs, etc. The second objective, which is optional, is for prediction models through training data.
CONCLUSIONS
Governments and automakers in the world are actively seeking innovative technologies for V2V, V2I, and V2X connectivity, and the fundamental technology to fulfill such connectivity is IoT. This new technical paradigm motivated us to explore new technologies regarding the smart-connected car. In this paper, we successfully developed actual modules based on CAN bus and 4G-LTE to obtain and transmit vehicle power train information. The information obtained by modules was also visually checked by our developed software.
However, although we implemented SQL-based relational DB for vehicle diagnostics and driving information, we realized that our implemented DB needs to be revised due to the conflict with the characteristics of NoSQL. This is a great asset for lessons learned and will be a part of our future work. We are still conducting this research, and successful cloud-based DFS implementation, as well as big data analysis, which will be the next main research topic in our future work.
Source: Texas A&M University
Authors: Donghwoon Kwon | Suwoo Park | Jeong-tak Ryu
>> Simple IoT Software Projects for Final Year Students